



人形机器人技术的发展路径正逐步明晰化。其中,一条发展路线代表为波士顿动力所推动的能够实现跑跳的足式机器人;另一条则是以Figure 01为代表的具备高度手眼协调能力的“心灵手巧”型机器人。
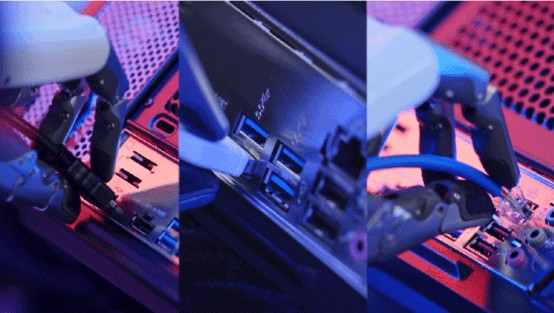
据记者了解,北京时间3月15日,「戴盟机器人」发布了新品“Sparky 1”视频。这是一款心灵手巧型人形机器人,在新一代视触觉传感+灵巧操作技术加持下,这款机器人展示了“巧手”的更多可能性。比如,机器人能够一口气完成“插线束接口”“焊接电路板”“滴试剂”“熨衣服”“倒酒服务”“物体分拣”“整理书架”等人类才能实现的“精细化”工作,进而解锁了家庭、工业、商业、研发等多个场景作业能力。
此次新品的发布,在业内被广泛解读为人形机器人在“心灵手巧”技术领域内的一大突破。投资界人士表示,戴盟机器人此次展示的新品不仅具体展现了其在“灵巧手”技术方面的成就,同时也为人形机器人解决通用性需求、并实现大规模量产的可能性进一步增添了信心。
![]()

以“插网线”为例。人类拿起一根网线并插入接口,需要动用“眼、手、脑”——“眼睛”涉及复杂的“标定”感知;“大脑”对“手”的控制区域,面积多达四分之一的大脑皮层;“手”的表面布满了触觉传感器,能感受振幅只有0.00002毫米的振动。
以上过程,至少同时涉及“视觉-触觉-动作”系统,这在人形机器人领域对应“多模态”技术。此外,机器人需要“听令行事”,还要加上“语言”模态。
而传统机器人系统主要依赖于单一模态或有限模态集成。即,听到了“拿网线”指令,但瞄不准“插口”的位置;或是,听到了指令,也瞄准了“插口”位置,但无法插进“插口”。
为此,「戴盟机器人」自研了“视觉-触觉-语言-动作端到端”技术。这种多模态模型集成了视觉、触觉和语言处理能力,可以根据语言指令理解任务要求,通过视觉和触觉信号感知周围环境,并据此实时产生适当的动作信号来执行任务。
正是得益于多模态集成技术,戴盟Sparky 1心灵手巧型人形机器人化身巧手“裁缝”,在精细操作任务中预期成功率提高至少20%;鲁棒性显著提高,任凭环境复杂多变,依然能够“眼尖手巧心不慌”。
![]()
其次,「戴盟机器人」创新性的开发出基于光学触觉传感器的五指灵巧手,可以为机器人提供了类似人类的操作能力和触觉反馈。
特别是相较于传统基于电阻、电容、压电和磁电式等的触觉感知方式,「戴盟机器人」采用基于光学的触觉传感技术,能够提供更多维度的触觉信息,如三维力、轮廓和纹理等等,这在国际上同样属于前沿技术。
另外一个“法宝”就是戴盟创始团队开发的新型视触觉传感器。该传感器由柔软的皮肤、嵌入式标记阵列、带有鱼眼镜头的网络摄像机组成。在接收接触力激励的同时,摄像机可跟踪标记运动并获得变形场。
再次,人形机器人即便长了一副“类人”躯体,如果没有进行人类经验视角下的足量训练,具身智能机器人也永远停留在想象中。因此,机器人的学习数据收集系统是重中之重。
斯坦福开源ALOHA系统是这方面的佼佼者。该系统利用两个几乎完全相同的小型、模块化双臂移动机器人,形成了一比一还原的“示教者-跟随者”遥操作框架。然而,该系统收集的数据很难用于其他构形的机器人上肢;与真实机器人上肢一模一样的遥操作系统,不便携且价值高昂。
为此,「戴盟机器人」设计了一套基于外骨骼方案的遥操作与数据收集设备,兼具便携和高性价比。
数据收集员随时随地就能穿上这套包含“图像采集头盔、6/7自由度外骨骼双臂、五指手数据手套”的设备,在各个场景进行数据收集。帮助机器人通过模仿学习,熟悉各个工种,随时准备“上岗”。
![]()

最关键的是这套外骨骼方案,成本低但性能可不低。不仅能够实现遥操作的高精度对应,而且动作映射误差率低于5%,从而能实现高效精准的遥操作功能和大规模的非异构数据收集。
这不仅是技术上的创新,更是商业模式上的突破——其提供了一个经济有效的方案,解决高效数据收集和机器人学习优化的难题,进而有望通过大规模实用数据的收集,促进人形机器人技术的普及和应用,填补市场的空白。
具体而言,Sparky 1开辟了人形机器人在医疗、制造、服务等领域的广泛应用前景,实现了“高性能”与“商业化落地”的完美融合。
在工业应用场景中,该机器人能够无需对现有生产线进行任何改造,即可快速而准确地完成3C产品制造、零件装配等复杂操作任务,显著提升生产效率及产品质量。同时,在排爆、生化及核危险物处置等高风险环境中,能有效替代人工作业,从而显著降低工伤及事故风险。
在物流应用领域,Sparky 1展现了其在户外及室内环境中处理物料搬运任务的能力,能够根据物体的大小和形状自主规划路径完成搬运工作,极大地提高了物流运输的效率。
科研领域内,Sparky 1能够辅助科研人员进行高精度的实验操作,如精确的试剂滴定、线束整理及瓶盖旋开等,适用于科学研究教育、航空航天、核能产业、生物医药等多个高技术领域。
在医疗领域,Sparky 1可辅助医生执行复杂的手术操作,提升手术的准确性与效率,并能在患者康复训练中发挥作用,有助于缓解医疗资源压力,提高康复质量。
在家庭服务领域,Sparky 1可以协助家庭服务和养老助老操作,帮助老年人做简单家务;帮助运动功能障碍人士完成各项任务。
随着个性化和高度灵巧的手部机械设计的不断进步,人形机器人也正逐步拓展至B端以外的消费者市场,为老年人和残疾人提供生活辅助,成为家庭中的“新成员”。随着这类具身智能技术的不断融入日常生活,人形机器人也将在C端加速落地。
根据高盛于 2024 年初发布的《人形机器人专题报告》中预测,在蓝海市场情景下,2035 年全球人形机器人的出货量将达到140万台,全球市场总规模预计将达到 380 亿美元。
“看行业发展的势头,随着机器人产业供应链越来越稳定,机器学习的成本也开始往下掉,心灵手巧型人形机器人会是我们重点关注的方向。”一位投资人表示,“这一领域的技术进步将会很快带动人形机器人的商业化落地,并且解锁其在各行各业的应用潜力。”





