编者按:本文来自微信公众号 “极客公园”(ID:geekpark),作者:Li Yuan,创业邦经授权转载。

机器人领域的风向可能又要变了。
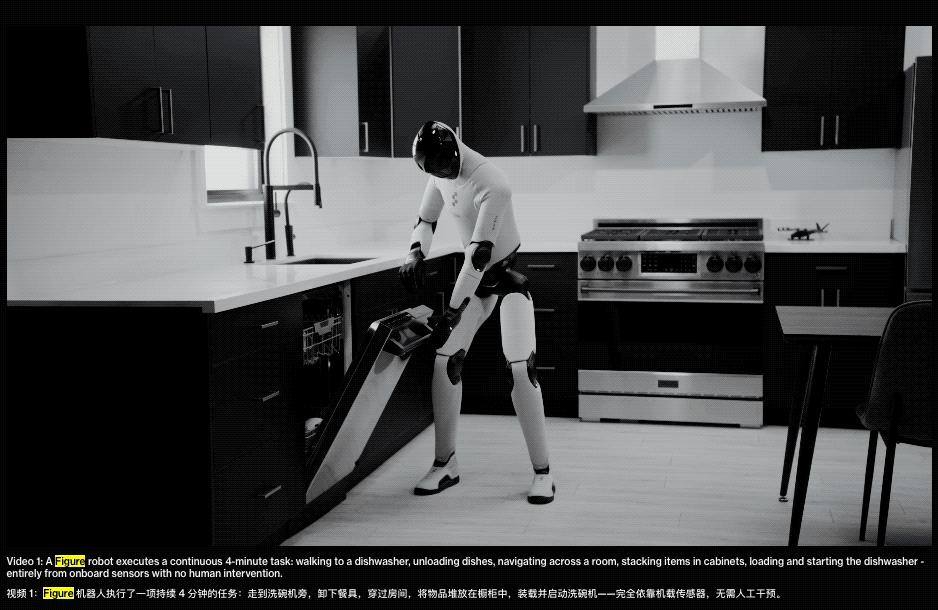
1 月 28 日,Figure 发布了自己最新的模型 Helix 02,并配上了一段三分半左右的视频演示。
作为普通人,乍一看这个视频可能觉得平平无奇,只是一个机器人在厨房里走来走去,做了一些把碗从洗碗机里拿出来收到柜子里之类的操作。
不过,就在视频快要结束之时,出现了一个极其拟人的动作。
它在关洗碗机的门时,先是用脚顶了一下,把洗碗机的门踢了起来,随后才弯腰关上了门。
机器人收碗可能之前是见过的,但这个动作之前却没有见过。
过去我们熟悉的机器人的逻辑是分块的。导航、走路、抓取,它们被切分成互不干扰的模块。
2025 年的机器人,基本上可以大概被划分为两类。一类关注全身控制的机器人的,会跳舞的机器人,本质上是在执行一段死板的程序,即使中途撞到障碍物,它也会机械地跳完。
而另一类关注灵巧操作的机器人,也就是会收碗的机器人,通常只是上半身在忙碌,下半身像个死板的底座,被轮子负载,仅仅负责位移。
但在 Helix 02 的突破点是,在这个模型中,运动与操作被彻底统一,一统了两类机器人的问题。
Figure 的工程师并没有预先训练它「如何用脚踢门」。这个动作是机器人基于内部知识的自发选择——它可能是判断到了弯腰太低对于重心不方便,于是根据当前的物理环境,自主判断出「用脚踢」是最高效的辅助手段。
2025 年,Figure 已经官宣估值到达 390 亿美金,比宇树传闻的 1000 亿人民币上市估值仍要高 3 倍。
这家全球最贵的人形机器人公司,研究出来的用脚关洗碗机,可能会终于解决大家对于跳舞的机器人不会干活的吐槽,引领下一波机器人风潮。
01 统一人形机器人的运动和操控
此次,Figure 发布的是它的新模型,Helix 02。
模型本身是端到端的设计。
头部的全景摄像头、掌心的近距离相机、指尖的触觉传感器,全身的关节运动状态全被喂进神经网络。
而输出则是一个完整的全身动作包。在这个瞬时的决策里,包含了腿部的支撑力、躯干的平衡倾角、手臂的延展路径,以及每一根手指的捏合力度。
一个模型,就可以控制 Figure 03 的 30 个自由度的机器人本体。
目前主流的 VLA 模型,大多依赖于向机器人喂入海量数据,比如通过人类遥控机器人收碗的数据,来训练它学会收碗这项技能。
而相比之下,Helix 02 的神经网络不再去学习「如何做一个收碗的任务」,它更多学习的是「人类运动的一般规律」。Helix 02 学习的是超过 1000 小时的重定向到关节的人类全身动作数据,借此获得了一种通用的物理先验。
除了用脚顶洗碗机门,还有一个动作也受到了大家的广泛关注。

在拿完东西关抽屉的时候,Helix 02 的模型直接选择了用胯顶了一下抽屉,把抽屉门关上。
Figure 自己在博客里解释了为什么要做这样一套运动和操控结合的系统:
移动操控,即机器人将移动和操控物体作为一种单一、连续的行为的能力,一直是机器人领域最难解决的问题之一。这并非因为单独实现这两项能力有多么困难,而是因为同时实现这两项能力难以进行清晰的分解。举起重物时,机器人的平衡会发生变化;向前迈步时,机器人的触及范围也会发生变化。手臂和腿会不断地相互制约。
人形机器人已经展现出令人印象深刻的短期行为,例如跳跃、跳舞和瑜伽,但几乎所有机器人都存在一个局限性:它们并非真正可控。大多数系统只是在离线状态下重现预先规划的动作,且反馈有限。如果物体发生移动或接触情况发生变化,行为就会崩溃。
传统机器人通过将运动和操作分离到不同的控制器中,并用状态机将它们连接起来来解决这个问题:行走、停止、稳定、伸展、抓取、再次行走。这种切换方式速度慢、难以判断,而且不自然。
真正的自主需要一些根本不同的东西:一个能够同时对整个身体进行推理的单一学习系统。一个能够持续感知、决策和行动的系统——边走边搬运,边伸手取物边调整平衡,并实时纠正错误。
事实上,这种思路与 Figure 早期开发 Helix 第一代模型时一脉相承。当时 Helix 证明了单个神经网络可以控制机器人的整个上半身,而不只是局限在机械臂或夹爪上。
但在那个阶段,这种能力依然存在局限。因为机器人的底座是固定的或者独立的,它只能在有限的范围内活动。
如今 Helix 02 的出现,将端到端的控制扩展到了机器人的每一个关节,实现了真正的全身自主。
而且在这段未剪辑的视频中,Helix 02 连续执行了 61 个运动操作动作,甚至展示了弯腰操作这种既考验平衡性,又考验操作性的动作,显示 Helix 02 已经在这套架构中取得了一定的成功。
而作为观众直观地去看时,当运动和操控结合进了一个模型,机器人更像是开始拥有了某种基础的身体意识,开始终于懂得「我手里抱着东西呢,用胯顶一下抽屉吧」这种之前人类才具有的「全身即工具」的直觉。
02 神秘的 system 0
之所以能实现这样的统一,部分原因是 Helix 02 的架构里,此次塞进了一个极其关键的底层组件:System 0。
这是一个专门负责物理本能的神经网络。在它出现之前,工程师们必须手动编写复杂的物理方程来维持机器人的平衡。Figure 这一次干脆删掉了 109,504 行手工编写的 C++ 代码,用一个单一的神经网络先验取而代之。
System 0 的核心任务只有三个:平衡、接触和全身协调。它的运行频率高达 1000 赫兹,这意味着它每秒钟要向电机下达 1000 次指令。这种极高的处理速度,让它能够像人类的脊髓反射一样,在意识到「要摔倒了」之前,就已经完成了肌肉力量的对冲。
更有趣的地方在于 System 0 的训练方式。工程师们并没有为行走、转身或者蹲下分别设计复杂的奖励函数,而是直接给模型喂了超过 1000 小时的人类全身动作数据,重定向到关节上,在仿真中进行了强化学习的训练。
在学习如何「复现人类动作」的过程中,模型自发地学会了如何协调全身的力矩,如何在各种姿势下维持重心。这就是为什么 Helix 02 的动作看起来不再僵硬,因为它不再是按照公式在计算平衡,而是在复刻一种被数据验证过的「人类直觉」。
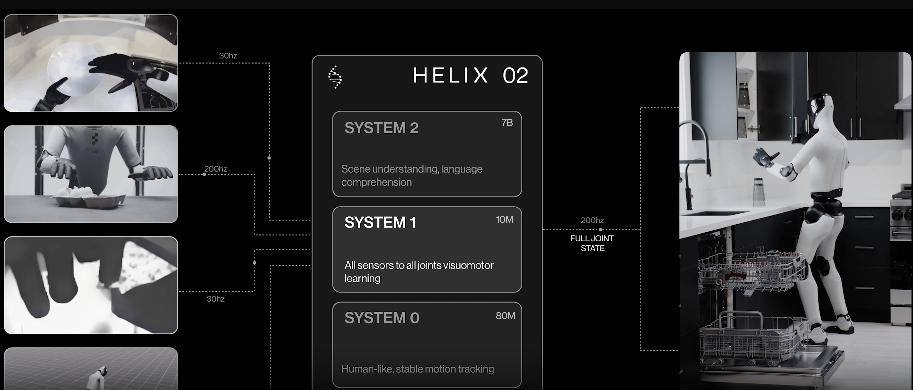
在 Helix 02 这种三层架构里,每一层都有明确的职责分工。处于最高层的是 System 2,它像是一个冷静的指挥官,负责语义推理。它不再需要操心机器人怎么迈步,而是直接下达模糊的目标指令,比如「走到洗碗机那并打开它」或者「把碗拿到柜台上去」。
中间层 System 1 则是敏捷的执行经理。它以 200 赫兹的频率运行,负责把眼睛看到的像素和指挥官的目标,转化为全身上下 30 个关节的运动目标。
最后,这些目标被交到 System 0 手里,转化为真实的扭矩输出,出现误差也可以获得高频的修改。
事实上,关于这种模型的讨论,在 2025 年就已经成为机器人圈子的前沿关注点。
具身智能投资人笔盒提到,之前英伟达发布的 Sonic 项目、西湖大学的身外化身系统,都展示了类似的逻辑。英伟达的 Sonic 项目当时用的 700 小时的数据。再往前,这种技术路线可以一路追溯到学术界的经典工作,比如 DeepMimic 和 BeyondMimic 系列。
在 2026 年的 CES 上,Sharpa 也展示过类似 CraftNet 的工作,核心也是 System 1 与 System 0 的耦合。
Sharpa 提出的「最后一毫米智能(LMI)」,就是利用 System 0 在接触物体的瞬间,通过触觉与力反馈进行实时精修。System 0 的运行频率约为 100 Hz,这让机器人能够像人手一样,感知阻力、滑动并进行实时修正。
2026 年,system 0 为机器人带来的惊喜可能会更多。
03 最贵的人形机器人公司
除了全身自主这一重头戏,Helix 02 还有不少其他看点:
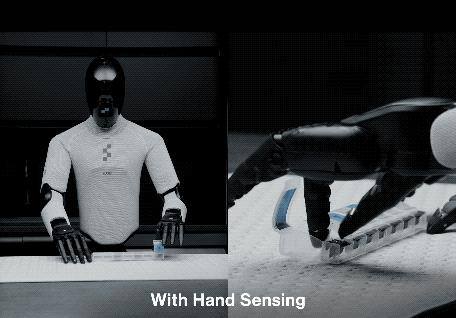
比如借助 Figure 03 的硬件底座,Helix 02 真正触达了多指灵巧操作的边界。以前的人形机器人往往在「自身遮挡」面前束手无策——一旦身体挡住了头部摄像头的视线,机器人就会变成瞎子。但 Figure 在每一只手的掌心都塞进了一枚广角摄像头,这给了它一种「手心长眼」的上帝视角。
配合每个指尖能感知 3 克微力的触觉传感器,它现在能完成极其细碎的动作:从杂乱的药盒里抠出一片单薄的药丸,或者在注射器上精准地推出 5 毫升液体。这种精细度意味着机器人不再只能干搬运箱子这种体力活,它开始具备了处理复杂工业零件、甚至是家庭护理的潜能。
在硅谷,Figure 的机器人是一个相对神秘的存在,他们很少出现在热闹的展会现场。
但在资本市场,它的声浪却是海啸级的。2025 年 9 月,Figure 完成了超过 10 亿美元的 C 轮融资,估值飙升至 390 亿美元。
Figure 的创始人布雷特·阿德科克(Brett Adcock)是一个极其硬核的连环创业者。他在 2022 年创立公司时,并没有先去忽悠风投,而是直接从兜里掏出了 1 亿美元的个人资金砸了进去。这种「带资进组」的底气,让 Figure 从一开始就保持了极高的独立性。
一个最典型的细节是,Figure 曾经是 OpenAI 在具身智能领域的头号合作伙伴,但这种合作关系在 2025 年 2 月戛然而止。
分手的理由就是 Figure 宣称 Figure 发现自己搞出来的 Helix 模型已经足够强悍。它不再需要一个远在云端的通用大模型来指挥自己,而是要构建一套属于物理实体的、像素到扭矩的内生逻辑。这种权力的收回,标志着 Figure 正式从「硬件载体」进化成了「大脑、小脑、身体」三位一体的完全体。
阿德科克曾公开表示,Figure 的终极目标是让机器人像人类一样进入每一个未知的家庭环境,执行那种不需要监督的、跨时天的复杂家务。在更远的愿景里,这些机器人还将承担起老年人护理,甚至是前往其他星球进行太空探索的重任。
第一代的 Figure 机器人就曾经进宝马工厂打工,而且有趣的是还是公司还公布了它的退休故事:在那里的 11 个月里,它协助组装了超过 3 万辆宝马 X3,行走了 200 多英里。
而 2025 年的新融资之后,阿德科克设计了一个极其宏大的「Master Plan」:他要在四年内通过自建的 BotQ 工厂生产 10 万台机器人。
当同一个机器人不止能跳舞,同时用同样的灵活性学会了用脚关门,学会了从药盒里抠出药片,市场前景可能比单独会跳舞的机器人或者轮式的双臂机器人大很多。
起码包括英伟达在内的不少资本,已经在 Figure 身上下注了。
*头图来源:Figure
本文为专栏作者授权创业邦发表,版权归原作者所有。文章系作者个人观点,不代表创业邦立场,转载请联系原作者。如有任何疑问,请联系editor@cyzone.cn。